Some time ago I found a really slick feedback system for DIY cockpit builders – a “shaker” system that pulled data out of the simulator in order to run a motor that would be capable of shaking your entire cockpit.
It’s called the BFF Shaker and can be found here: http://bffsimulation.com/BFF_Shaker.php
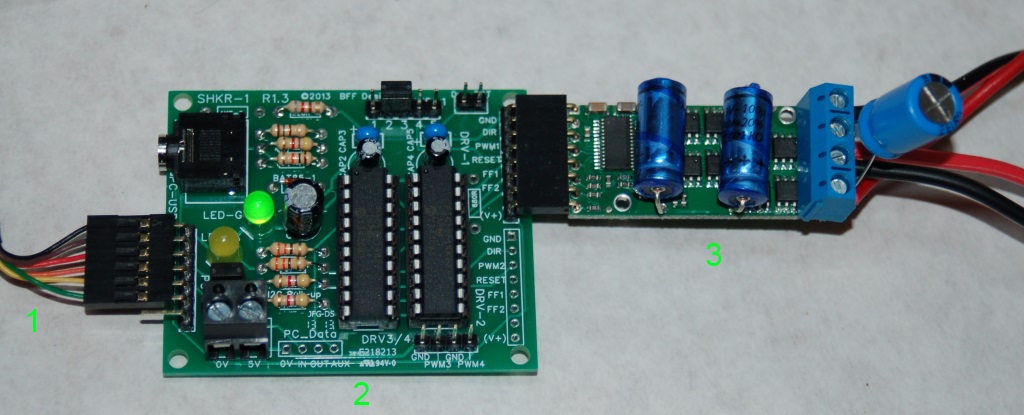
I started my setup with the SHKR-1 board and the 36v15 motor driver from Pololu:
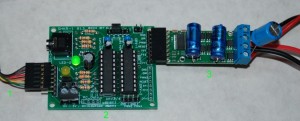
1 – an FTDI USB/Serial cable from SparkFun. Note that in order to use this cable with the SHKR-1, you’ll need to invert the TX, RX, CTS and RTS pins. The documentation for the SHKR-1 talks about the software you’ll need to do this. This serial cable is how the host software controls the SHKR-1.
2 – The SHKR-1 board itself. This controller board can drive two of the Pololu motor driver simultaneously. It also has an output that you can use to drive a “buttkicker” speaker. (You can use the “buttkicker” alone if you don’t want to build the motor drive system that I show here.)
3 – A Pololu 36v15 motor driver – this takes 24VDC in and allows the SHKR-1 to control a DC motor.
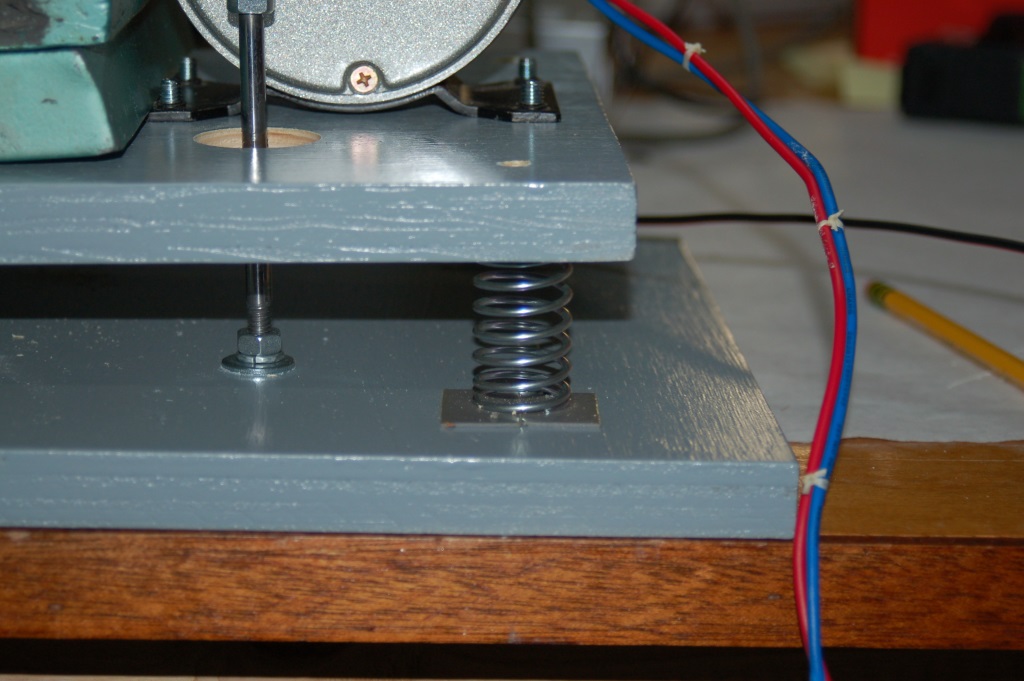
I followed the example of another BFF Shaker builder (Roland) and built a motor platform that rides on four springs.

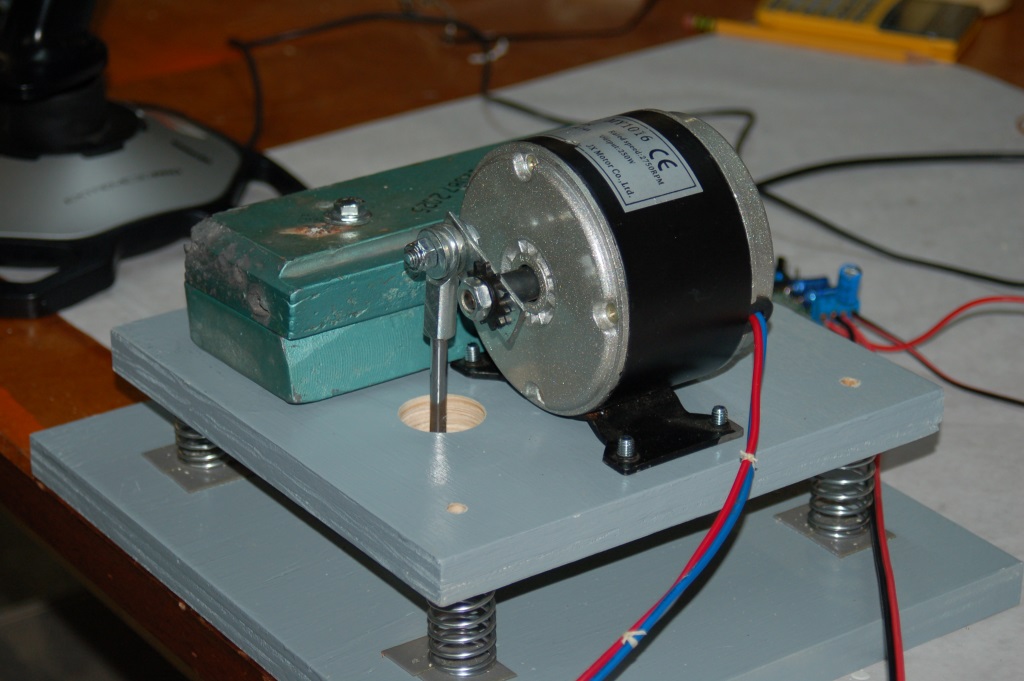
This is a used 24VDC, 250 watt motor. I bought it off eBay for about $20. The green blocks next to the motor are a pair of lead C/G weights that I removed years ago from the nose of my F-15C. There’s about 23lbs of lead there. 🙂
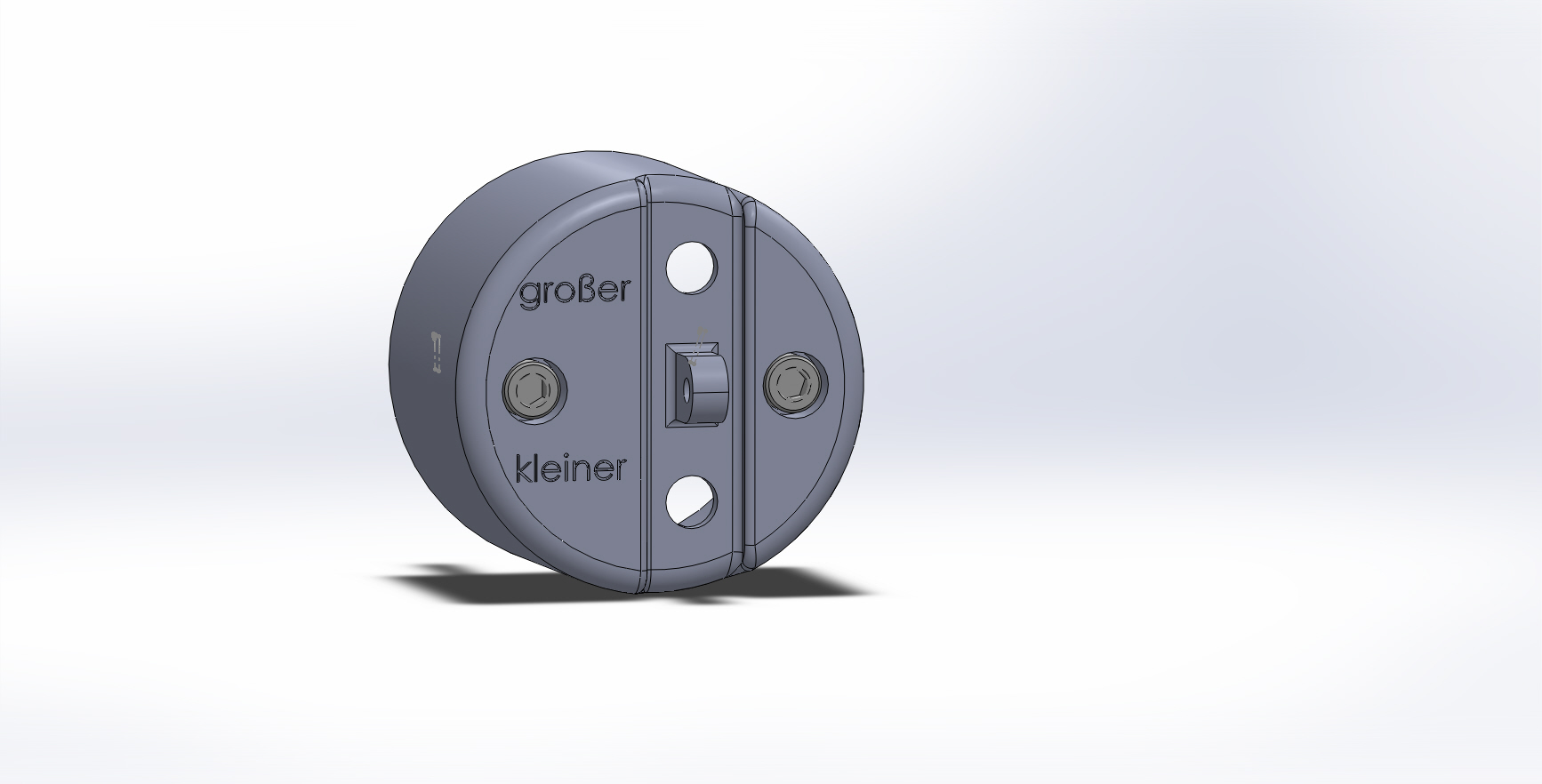
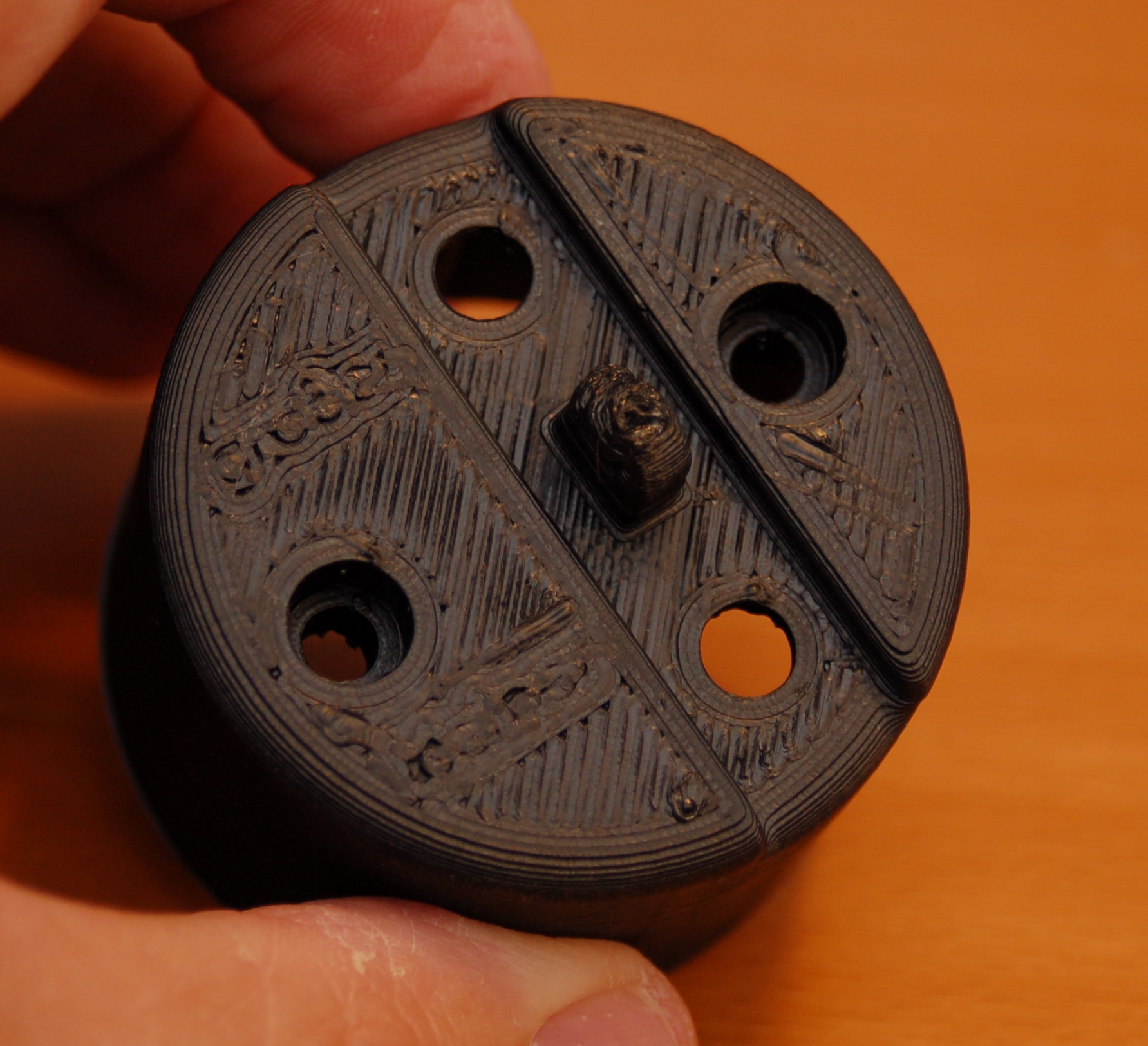
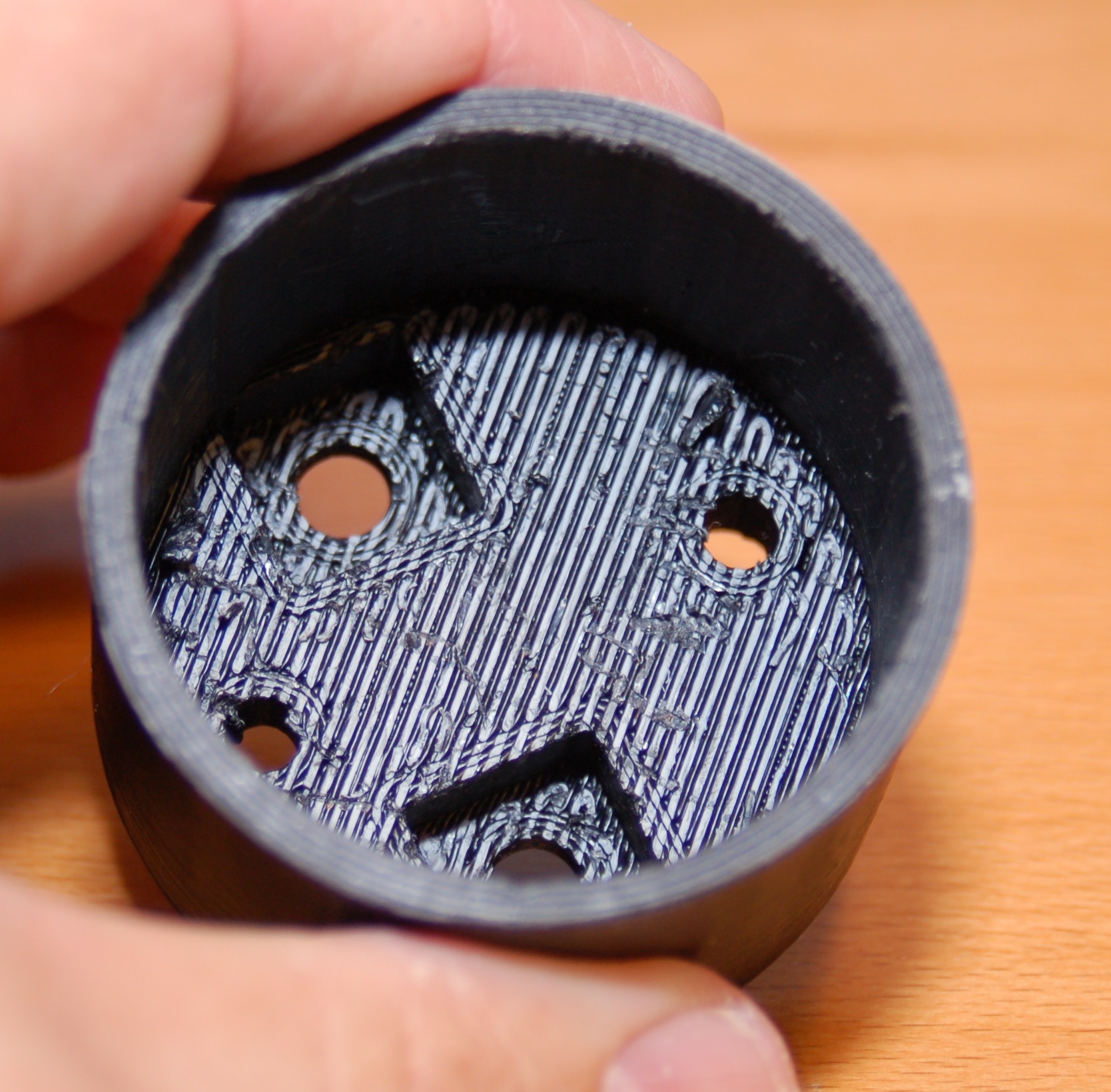
The motor is connected to an offset shaft that is fixed in place to the base platform. When the motor moves up and down, it’ll transmit that vibration to the rest of the cockpit. Unlike Roland’s setup, I didn’t insulate the shaker from the rest of the cockpit. When this sucker is going, EVERYTHING shakes. 🙂
The springs are held in place using 3M VHB (Very High Bond) double-sided tape. This stuff is VERY strong. Each spring is rated for about 15lbs of compression force.
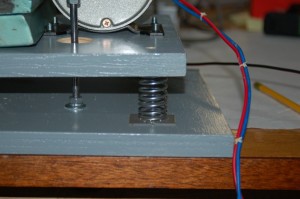
Here’s another shot showing the rig:

Here’s a video showing how the whole thing operates:
httpv://youtu.be/jFiU_Qq5iu4
I went ahead and got it installed in the #0 Series One cockpit, right behind the seat:

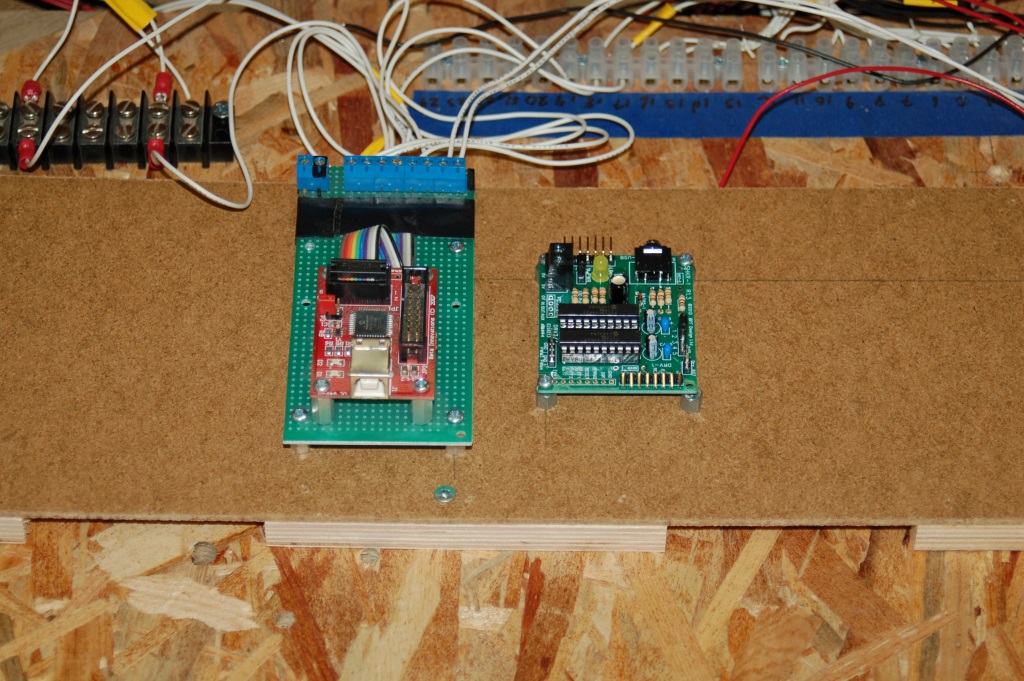
I also spent some time cleaning up the wiring in the front end and got the Plasma-MM2 interface controller properly mounted.


The black box on the left is the 5VDC power supply I use for the panel lighting. The silver box next to that is the 24VDC power supply that the shaker system uses.
Current cockpit configuration:

The shaker system adds a LOT to the whole experience. It’s a blast to be able to flip on the battery switches, turn on the mags and then mash the starter button and actually FEEL the engine start. The shaker in the back end really makes that little cockpit rock and roll. It’s just awesome. I hope to be able to get some more than once-around-the-field time in it soon. I need to toss together a screen while I’m waiting for my castAR to show up. 🙂